在游戏开发的过程中,Billboard的一般做法是通过view和up两个向量构建一个旋转矩阵,从而调整sprite facing使其与观察空间某个向量对齐(up / normal),而众所周知构建一个旋转矩阵需要三个正交基,但我们现在就只有view和up两个基,还不正交,所以免不了要用叉乘对原来这两个二维基向量进行“升维”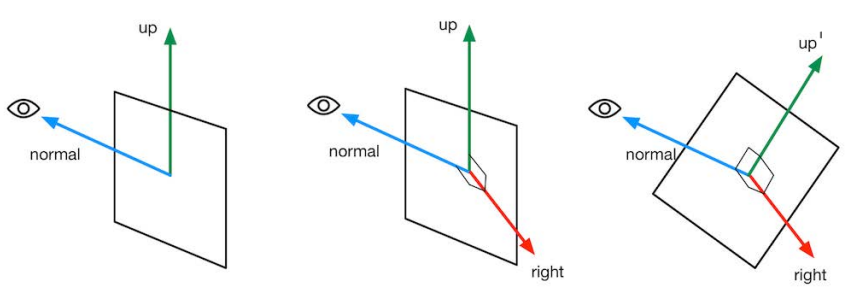
具体步骤是,先用 up×view 算出 right,构建出一个临时的坐标空间;然后再以这个临时空间为参考系,用 normal×right 算出up’,再在这由两个向量张成的二维平面上再做一次升维。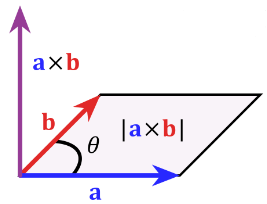
因为这样得到的三个基向量可以保证相互正交,所以像这样构建旋转矩阵是非常合理的。
这是叉乘的做法。
但我们又知道,旋转矩阵之所以要用三个正交基去构建,是因为他本身就是一个标准正交矩阵,而在 $$\mathbb{R}^3$$ 找一个平面的正交基可以使用施密特正交化,那上面提到的叉乘这种做法又和施密特正交有什么关系呢?
我们不妨由公式做一些简单的推导
假设有 $$view=(v_1,v_2,v_3)$$ , $$up=(u_1,u_2,u_3)$$
依据叉乘公式
和施密特正交化公式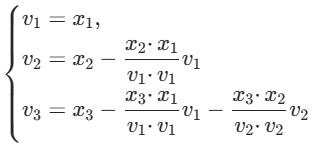
叉乘法先求 right 再求 up’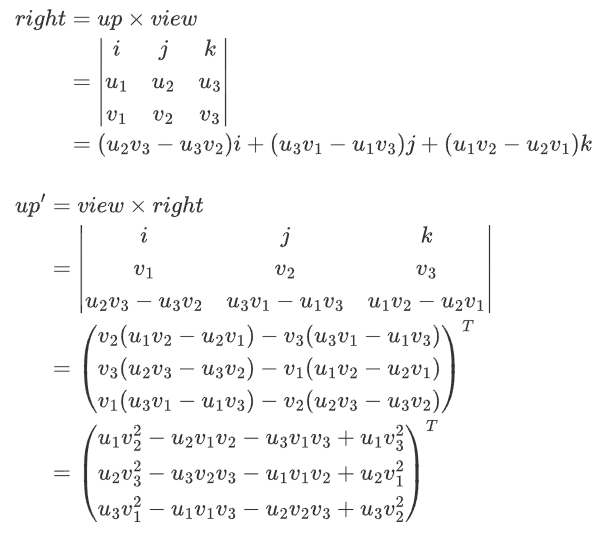
而施密特正交化结果: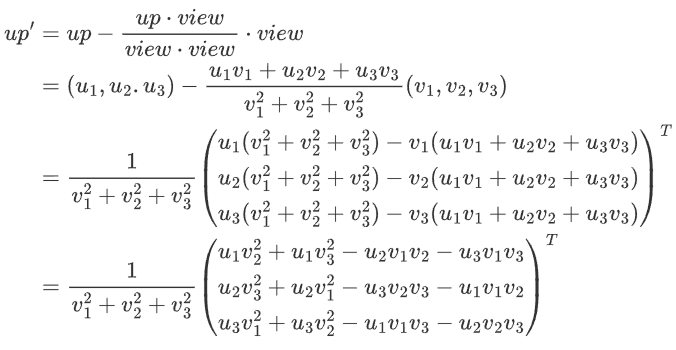
类似的可以求出 right,可以发现两个结果差了一个模长的平方倍,如果进行正交化的几个基均为标准基(即模长均为 1),那么这两个结果应该是一模一样的
两种方法的区别在于
1、叉乘法有先后顺序,而施密特正交化没有
2、叉乘法可以理解为升维,而施密特则可以理解为投影(本来也是这么推出来的,感兴趣可以看看下面这篇)
而从实践的角度,显然叉乘法更为直观…. 所以这篇文章只是提供了一种另类的理解方式,把两个看似无关的东西联系在了一起(就摁水)
大概就酱、
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 Yui Lu!
 wechat
wechat- alipay





