一、引入
计算机图形学下关于“实时”的定义:>30fps,<30fps称为离线
计算机视觉与计算机图形学的区别: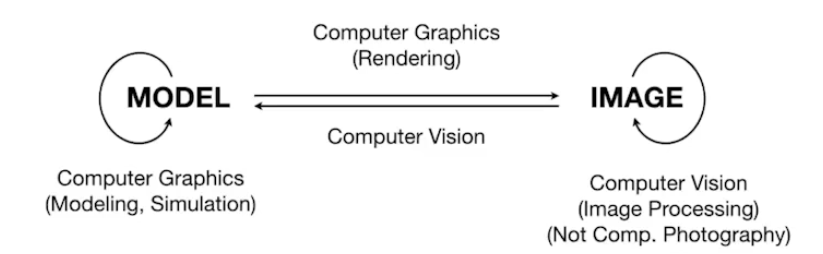
二、线代基础
基础运算
叉乘基本运算
$$
\displaylines{\vec{a}\times\vec{b}=-\vec{b}\times\vec{a}\\
\vec{a}\times\vec{a}=\vec{0} \\
\vec{a}\times(\vec{b}+\vec{c})=\vec{a}\times\vec{b}+\vec{a}\times\vec{c} \\
\vec{a}\times(k\vec{b})=k(\vec{a}\times\vec{b})}
$$
图形学叉乘应用:判断左/右&内/外
正交坐标系定义
$$
\displaylines{
||\vec{u}||=||\vec{v}||=||\vec{w}||\\
\vec{u}\cdot\vec{v}=\vec{v}\cdot\vec{w}=\vec{w}\cdot\vec{u}\\
\vec{w}=\vec{u}\times\vec{v}(右手)\\
\vec{p}=(\vec{p}\cdot\vec{u})\vec{u}+(\vec{p}\cdot\vec{v})\vec{v}+(\vec{p}\cdot\vec{w})\vec{w}}
$$
矩阵乘法
要第几行第几列,就去找第几行和第几列,左管行,右管列
设矩阵A和矩阵B,则:
1、AB和BA大多数情况下不等
2、只要不涉及前后交换,以下等式均成立
$$
\displaylines{
(AB)C=A(BC)\\
A(B+C) = AB +AC\\
(A+B)C =AC +BC\\
}
$$
矩阵和向量的乘法
总是把向量视作列向量并置于乘号右边
矩阵转置(ij -> ji)
$$
(AB)^T=B^TA^T
$$
单位矩阵
$$
\displaylines{
AA^{-1}=A^{-1}A=I\\
AB^{-1}=B^{-1}A^{-1}
}
$$
向量乘法的矩阵形式
$$
\displaylines{
\vec{a}\cdot\vec{b}=\vec{a}^T\vec{b}\\
\vec{a}\times\vec{b}=A^*b
}
$$
向量变换
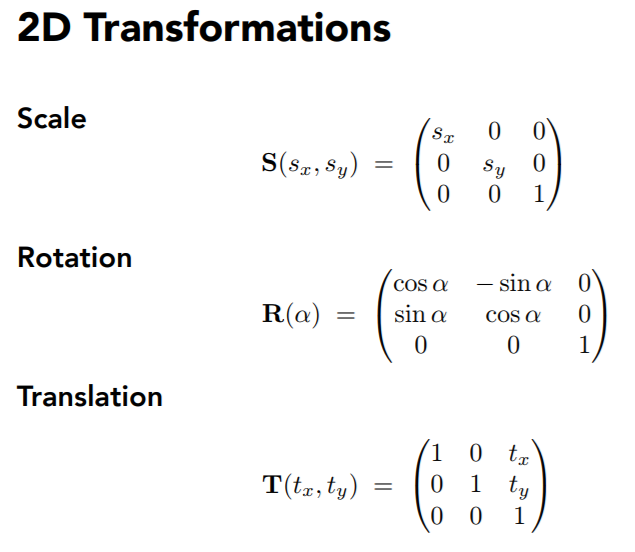
2d
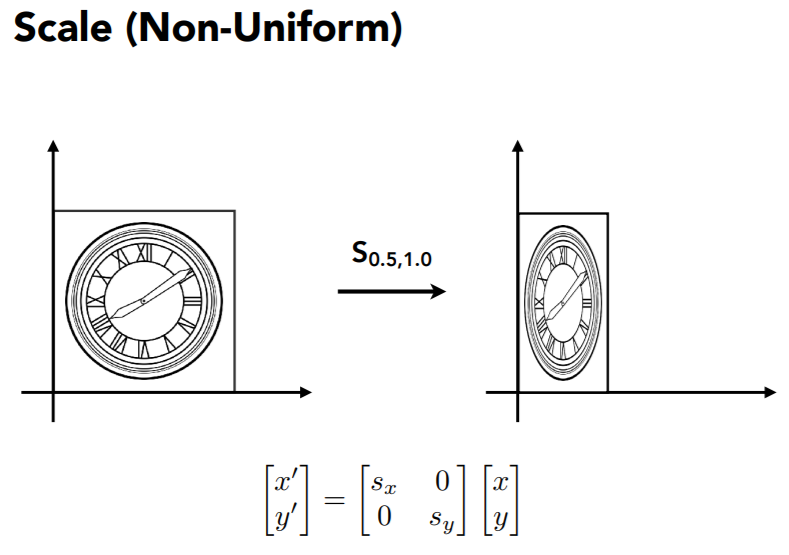
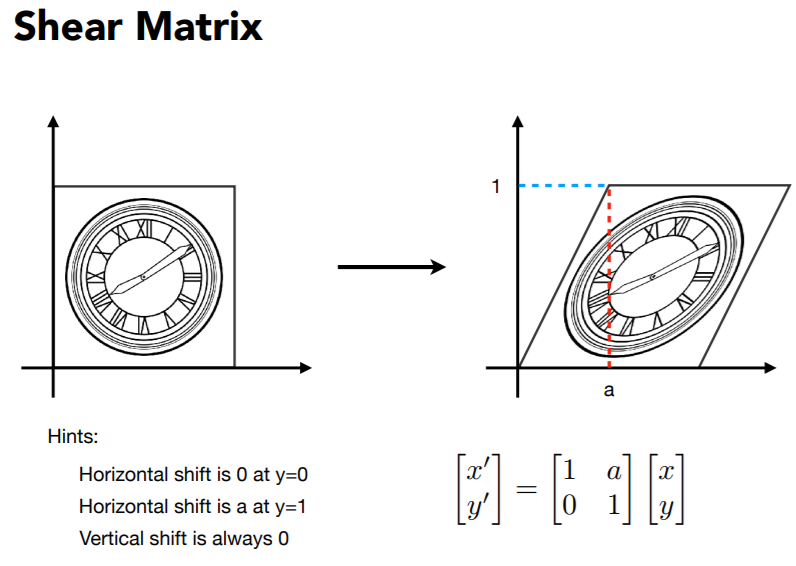
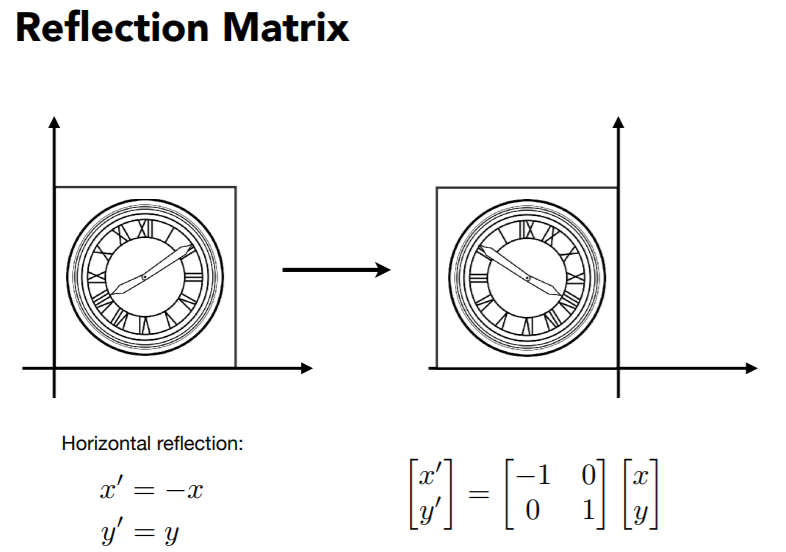
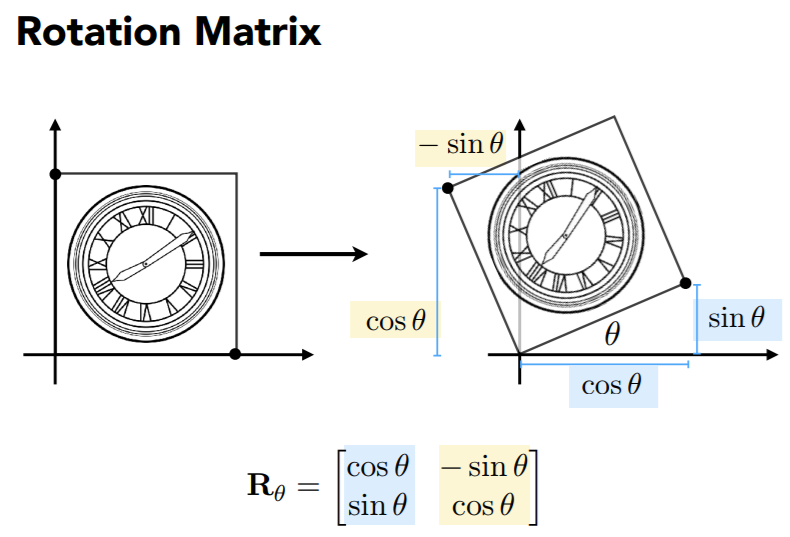
线性变换
| 缩放 | 切变 |
|---|---|
 |
 |
| 对称 | 旋转 |
 |
 |
相同维度线性变化:
$$
\displaylines{
x’=ax+by\\
y’=cx+dy\\
\left[
\begin{matrix}
x’\\
y’\\
\end{matrix}
\right]=
\left[
\begin{matrix}
a&b\\
c&d\\
\end{matrix}
\right]
\left[
\begin{matrix}
x\\
y\\
\end{matrix}
\right]\\
x’=Mx
}
$$
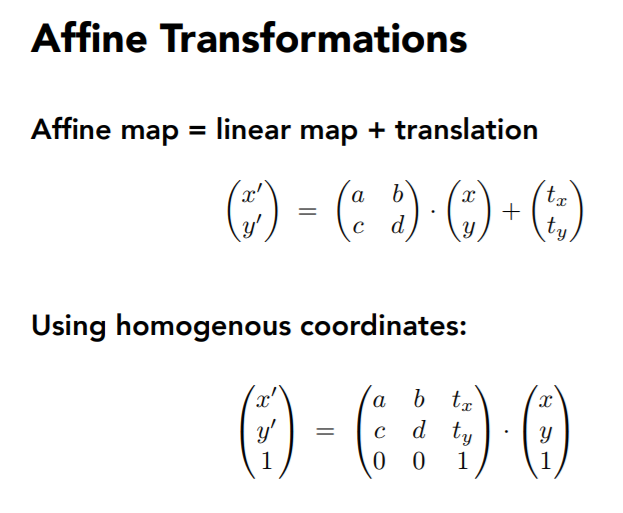
齐次坐标
点(x,y,1) 向量(x,y,0) 则有:
点-点=向量,向量$\pm$向量=向量,点+向量=点,点+点=两点的中点
在齐次坐标中,$\left(\begin{matrix}x\\ y\\ w \end{matrix} \right)$都视作$\left(\begin{matrix}x/w\\ y/w\\ 1 \end{matrix}\right)$,其中$w≠0$
仿射变换
仿射变化=线性变换+平移
 |
 |
|---|
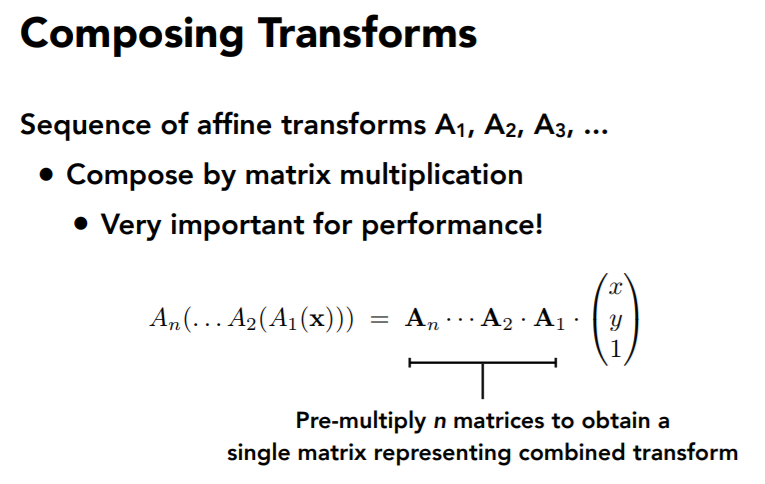
矩阵相乘不满足结合律
例如,先旋转再平移和先平移再旋转所得结果不一样
变换合成(结合律的体现)
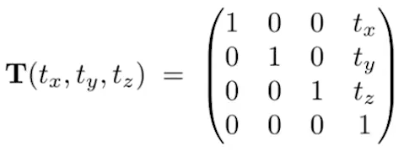
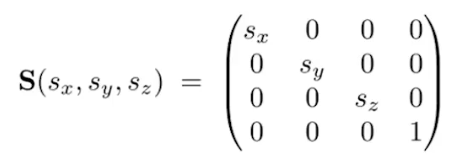
3d
| 平移 | 缩放 |
|---|---|
 |
 |
| 旋转 | |
|---|---|
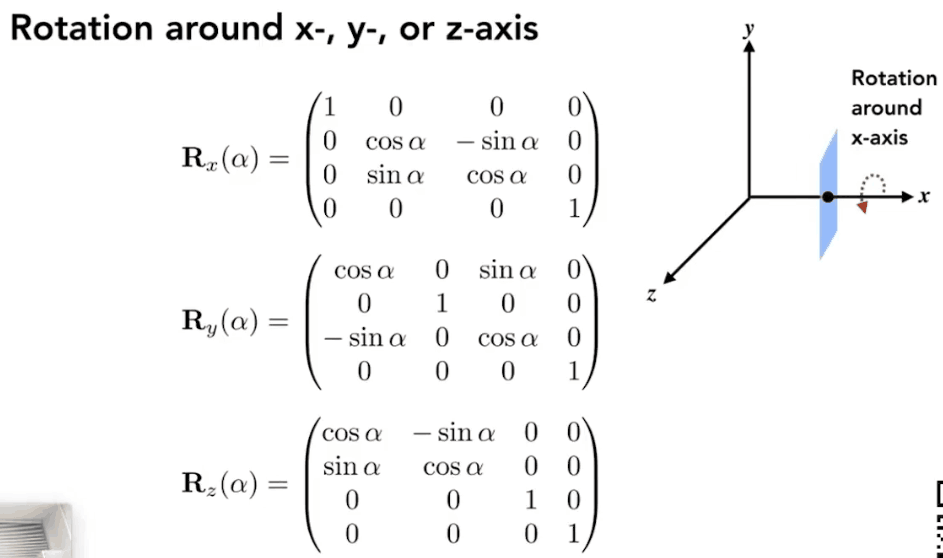 |
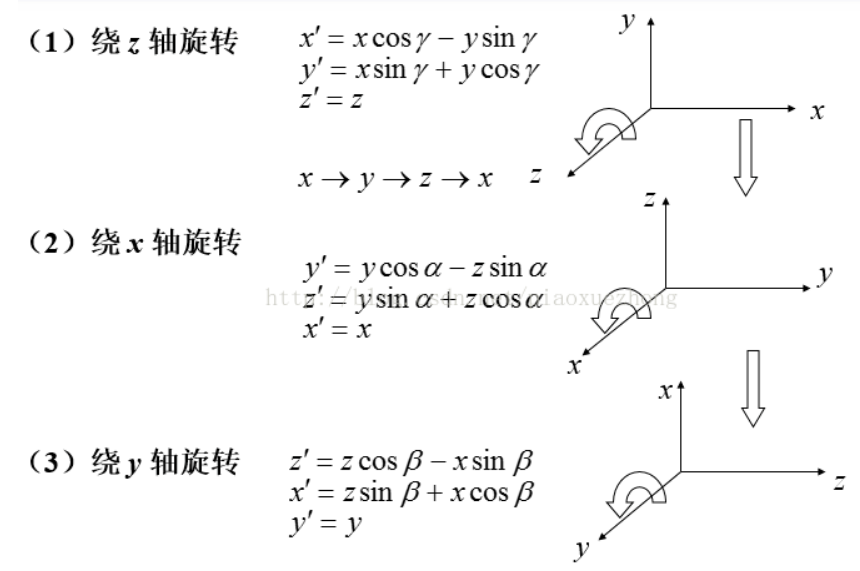 |
3d旋转变换矩阵遵循循环对称:$X\times Y=Z,\ \ Y\times Z=X,\ \ Z\times X=Y$
合成的旋转变换:$R_{xyz}(\alpha,\beta,\gamma)=R_x(\alpha)R_y(\beta)R_z(\gamma)$
罗德里格斯旋转公式
绕旋转轴n旋转α角度
$$
R(n,\alpha)=cos(\alpha)E+(1-cos(\alpha))nn^T+sin(\alpha)
\left(\begin{matrix}
0 & -n_z & n_y \\
n_z & 0 & -n_x \\
-n_y & n_x & 0
\end{matrix}\right)
$$
推导过程:
四元数:旋转与旋转之间的差值,具体内容略去
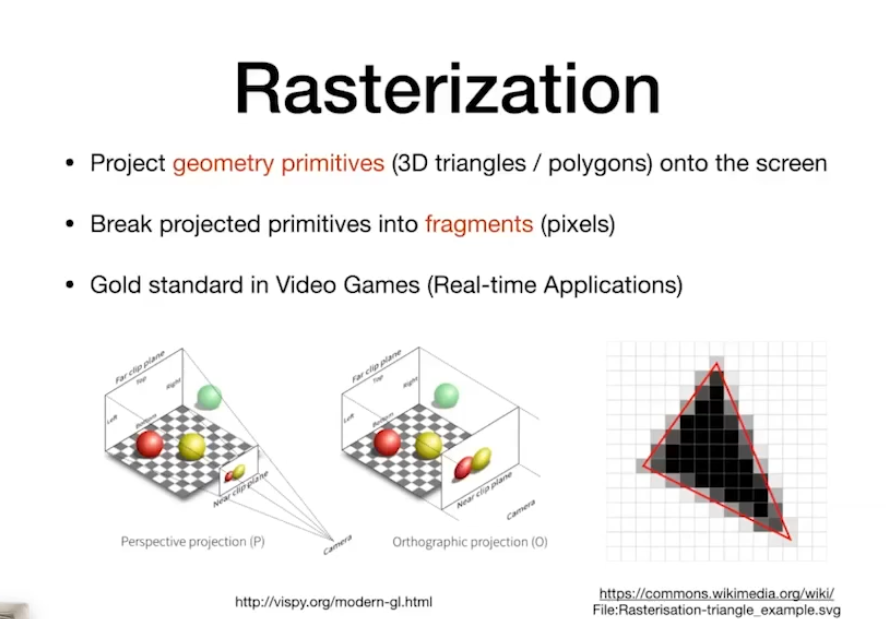
视图 / 相机变换
如何将三维变成二维并在屏幕上显示出来
1、模型变换 (M) 2、相机变换 (V) 3、投影变换 (P)
定义相机属性
1、位置 $\vec{e}$
2、视线方向 $\widehat{g}$
3、垂直方向 $\widehat{t}$
初始:up at Y, look at -Z
如果把摄像机和世界一起变换,那么照片是一样的,所以把摄像机变换到新坐标系的原点,其他所有物体也做同样的变换
teg坐标系怎么转变为xyz坐标系
$M_{view}$ in Math?
$M_{view}$=$R_{view}$$T_{view}$
1、先做平移,$T_{view}=\left[\begin{matrix}1&0&0&-x_e\\ 0&1&0&-y_e\\ 0&0&1&-z_e\\ 0&0&0&1\end{matrix}\right]$
2、再做旋转,顺着思路要把 $\widehat{g}$ 旋转到$-Z$坐标轴,把 $\widehat{t}$ 旋转到$Y$坐标轴,把$(g\times t)$旋转到 $x$ 坐标轴,但这样的旋转矩阵非常难写
所以采用逆向思路,把坐标轴移到相机坐标轴,通过逆操作写(该旋转矩阵为正交矩阵,其逆矩阵就是它的转置矩阵)(基变换)
$$
R^{-1}_{view}=
\left[\begin{matrix}
x_{\widehat g\times \widehat t} & x_t & x_{-g} & 0 \\
y_{\widehat g\times \widehat t} & y_t & y_{-g} & 0 \\
z_{\widehat g\times \widehat t} & z_t & z_{-g} & 0 \\
0 & 0 & 0 & 1
\end{matrix}\right]
$$
$$
R_{view}=
\left[\begin{matrix}
x_{\widehat g\times \widehat t} & y_{\widehat g\times \widehat t} & z_{\widehat g\times \widehat t} & 0\\
x_t & y_t & z_t & 0\\
x_{-g} & y_{-g} & z_{-g} & 0\\
0 & 0 & 0 & 1
\end{matrix}\right]
$$
投影变换(难点)
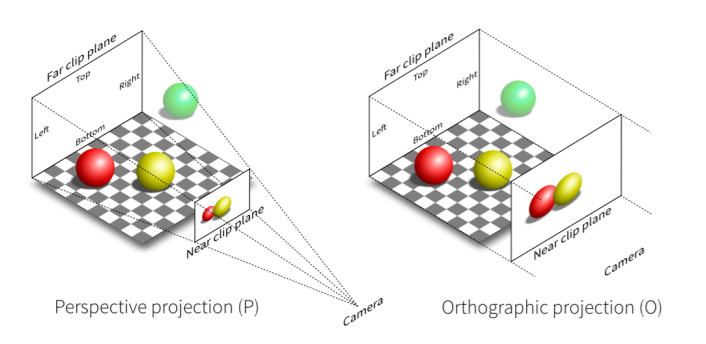
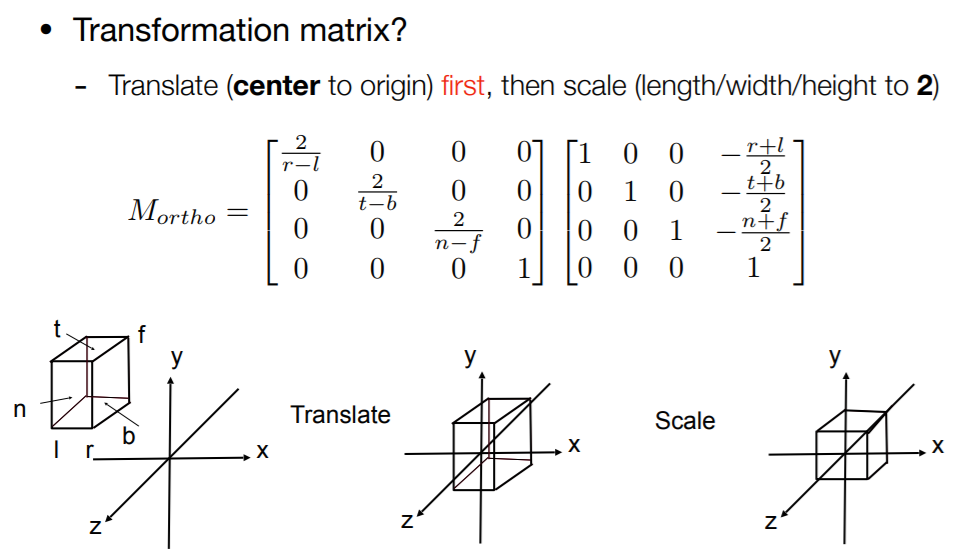
正交投影
相机位置无限远,没有远近概念(忽略深度信息)
步骤:先做平移,再做缩放,目标是吧投影全塞在 $[-1,1]^2$ 的长方体内
透视投影
用的最广泛的投影,近大远小,
根据已知的$Near、Far、Fov、Aspect$确定透视投影的投影矩阵,如下
$$
M_{frustum}=
\left[\begin{matrix}
\frac{cot\frac{FOV}{2}}{Aspect} & 0 & 0 & 0 \\
0 & cot{\frac{FOV}{2}} & 0 & 0 \\
0 & 0 & \frac{Near+Far}{Near-Far} & -\frac{2Near·Far}{Near-Far} \\
0 & 0 & 1 & 0
\end{matrix}\right]
$$
具体推导如下: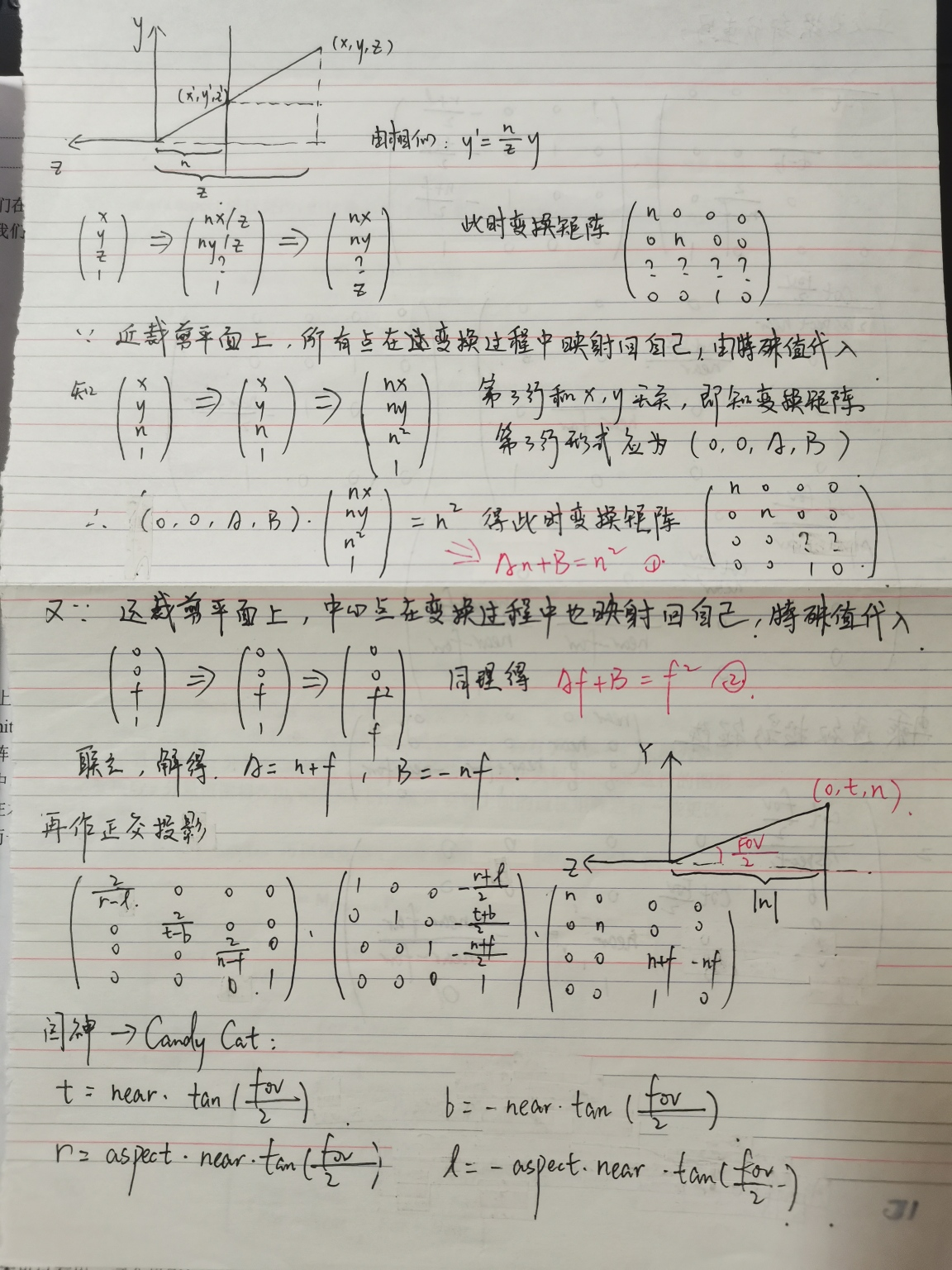
关于课上的思考问题,视锥体压缩成长方体以后,内部的点的z值是更偏向于近平面还是更偏向于远平面?
 wechat
wechat- alipay


.png)
.png)
.png)



